Don't Miss
MIT研自駕船避碰撞應付海流
By 信報財經新聞 on October 29, 2020
原文刊於信報財經新聞「StartupBeat創科鬥室」
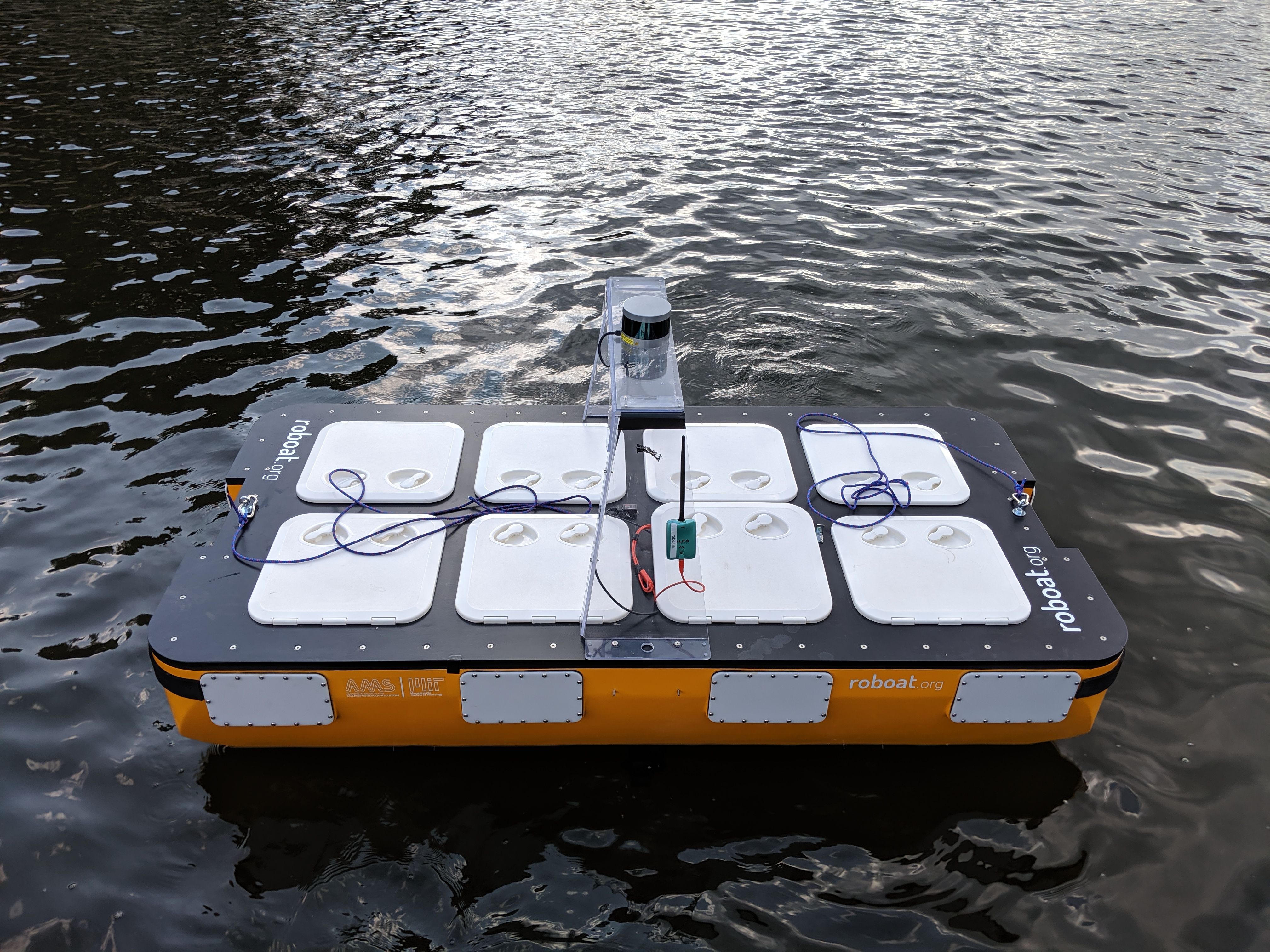
麻省理工研發的自駕船配備四個螺旋槳。(MIT圖片)
現時主流的自駕技術大多集中在陸上汽車,水路交通甚少聽聞。經過5年時間的研究,美國麻省理工學院(MIT)之電腦科學與人工智能實驗室(CSAIL),最近在荷蘭阿姆斯特丹運河測試新一代自駕船Roboat II,旨在實時識別水面物體,自動繞道以免撞船,應付海流等環境干擾。
荷蘭運河測試
船身重約50公斤、長度大約兩米,採用鮮黃色外觀設計,配備了4個螺旋槳,一次可運載兩名乘客;為協助系統自動導航,裝設光學雷達(LiDAR)、 GPS衞星定位功能,以及慣性傳感器(Inertial Sensor)。這艘船可在城市運河上,自動航行3個小時,再返回起程的地方,誤差幅度不到7英寸(約17.78厘米)。
研究人員收集測試數據後,正開發更大型的測試船,足以搭載4至6名乘客;除了根據天氣及交通狀況,自動繪製航程的路徑圖,日後進一步改良演算法,開發一種「分布式控制系統」(DCS),讓領航船跟其他自駕船隊協作,集體在水道運送大量貨物。
支持EJ Tech


如欲投稿、報料,發布新聞稿或採訪通知,按這裏聯絡我們。
















{kind=link}
{kind=link}